記事タイトルまたは写真をクリックすると詳細記事へジャンプします。
 |
|
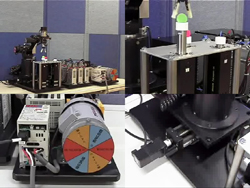
モーションフィールドネットワークのMECHATROLINK対応機器を使用した搬送ロボットシステムの動作の様子をご紹介しています。
MECHATROLINKⅠ/Ⅱの対応機器を最大30局まで制御出来るPCI-busホストコントローラボード「MLH20-1030」を使用して、ステッピングモータ制御の多関節ロボットやサーボモータ、I/O機器、インバーターの制御をする様子を動画でご紹介しています。
|
 |
|
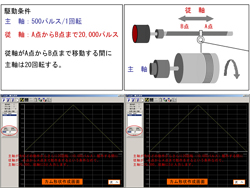
電子カムコントローラ用通信ソフトの「ECM010JWIN」を用いたカム形状やプログラムの作成手順等をご紹介しています。
|
 |
|
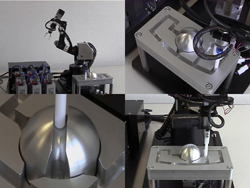
MECHATROLINKⅡ対応のPCI-busホストコントローラボード「MLH20-1030」を用いたデモ機の動作を動画でご紹介しています。
MLH20-1030でMECHATROLINK対応ステッピングモータドライバ「MLUシリーズ」を6軸駆動し、多関節ロボット「RV-500」を制御します。
多関節ロボット「RV-500」は掴んだ棒を経路プレート内の溝に挿入し、予め設定された経路を溝や半球回転体に接触しないように進みます。
|
 |
|
USB対応ネットワーク型コントローラ「CMS-100」とマン・マシンインターフェイス(駆動ソフトウェア)「MYCISⅡ」の機能・性能を映像にてご紹介しています。
|
 |
|
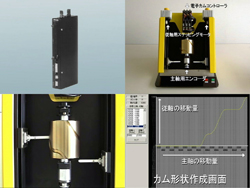
電子カムコントローラ「ECM-011」の紹介ビデオです。
パソコンでのカム形状作成画面、デモ機の動作風景を収録しています。
|
|
|

