このコーナーでは、技術研究所をはじめとするマイコムの技術現場の最新情報を紹介しています。
今月は、12月6日から8日に開催された「SEMICON JAPAN 2006」にて展示を行った、MECHATROLINKⅡホストコントローラボード「MLH20-1030」とMECHATROLINKⅠ/Ⅱ対応機器を使用したデモ機の動作の様子をご紹介いたします。
再生ボタンを押す事でそれぞれの動画がスタートします。
デモ機 動作風景
デモ機 各部紹介
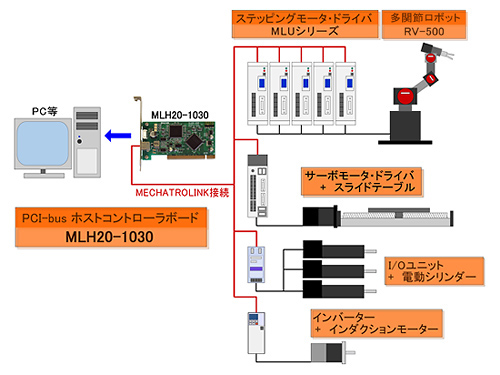
上図構成図のように、PCI-busボードタイプの「MLH20-1030」1枚で、ステッピングモータやサーボモータ、I/O機器やインバーターなどすべての機器をコントロールしています。
多関節ロボット + MECHATROLINK対応ステッピングモータ・ドライバ
5相ステッピングモータを5軸使用した多関節ロボット「RV-500」をMECHATROLINK対応ステッピングモータ用ドライバ・MLU504にて駆動しています。
I/Oユニット + 電動シリンダー
MECHATROLINK対応のI/Oユニットで3軸の電動シリンダーを制御しています。
左:I/Oユニット
右:電動シリンダー用ドライバ・コントローラ
サーボモータ + スライドテーブル
MECHATROLINK対応のサーボモータ・ドライバでスライドテーブルを駆動し、多関節ロボット「RV-500」を左右に動作させています。
インバーター + インダクションモーター
MECHATROLINK対応のインバーターでインダクションモータの制御をしています。
「MLH20-1030」の製品情報詳細は
こちら
「MLU504シリーズ」の製品情報は
こちら