| ドライブモニタ信号 |
 |
脱調に起因する過負荷駆動時に出力される警告信号の条件(速度や分割数など)はありますか。 |
|
 |
ドライブモニタが機能する条件は、次の通りです。
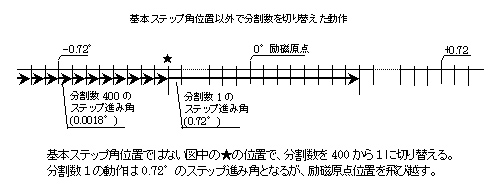
■分割数1〜40 (基本ステップ0.72°)
■速度300rpm〜約4,500rpm
|
|
 |
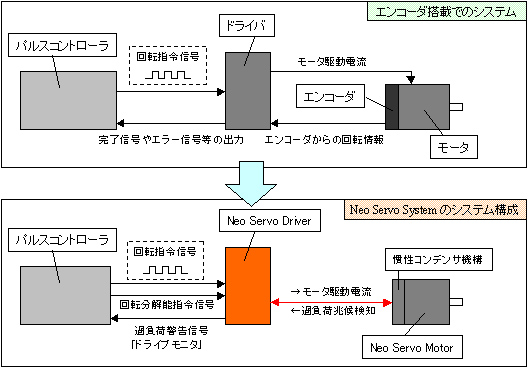
これまでの脱調検出には、モータに搭載するエンコーダまたはレゾルバといった外部センサからの回転情報を得る方法と、モータ駆動電流の乱れを検知して回転情報を得る方法があります。
前者の場合にはモータサイズが大きくなり、ドライバからモータへのケーブル配線が面倒であること、ドライバ回路の規模も大きくなります。後者の場合には、前者の欠点はなくなりますが、脱調状態は検出できても、その兆候状態の検出は難しいとされています。
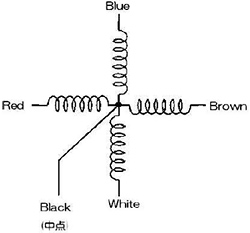
そこで、マイコムのNeo Servo Systemでは、マイコム独自の慣性コンデンサ搭載のクロスバイポーラ結線によるモータ構造によって回転の超低振動化とモータ巻線からの回転情報を得る方式を構築しました。
その結果、定格トルク以内の負荷に対しては「脱調レス」、定格トルクを超える負荷変動による脱調とその兆候を捉え、警告信号としてモニタすることが可能となりました。
<エンコーダレスでの脱調検出>
|
|
 質問のトップへ戻る 質問のトップへ戻る |
|