パルス制御LSI/パルスジェネレータ
MPG2032

特徴
- 1チップでサーボモータ・ステッピングモータの2軸制御が可能
- 加減速形状は任意形状(S字)・台形
- 最大出力パルス2MHz
- 1個(2軸)もしくは複数個用い直線補間駆動が可能
- 多軸同期スタート機能
- 減速開始点は自動演算機能とマニュアル機能の2モード
- 原点サーチ動作は3モード
- エンコーダカウンタ内蔵
- 割り込み機能
- 駆動システムにストレスを与えない三角駆動回避機能
仕様
| 項目 | 内容 | ||
|---|---|---|---|
| 電源電圧 | 5V±5% | ||
| 入出力レベル | TTLレベル | ||
| 基準クロック | 131kHz〜4MHz | ||
| 総パルス数設定範囲 | 1〜16,777,215パルス 又は無限 | ||
| 減速開始点設定範囲 | 0〜16,777,215パルス | ||
| 周波数設定ステップ数 | 65,535 step | ||
| 加減速傾斜設定ステップ数 | 65,535 step | ||
| 出力パルス分周ステップ数 | 256 step | ||
| 任意形状傾斜データ数 | 128 | ||
| 出力周波数範囲 | 0.004〜256Hz (CLK=131kHz、分周比=256) 1〜65,535Hz (CLK=3.2768MHz、分周比=61) 30.5〜2,000,000Hz (CLK=4MHz、分周比=1) |
||
| 動作及び機能 | 任意形状および台形加減速駆動 多軸同期スタート機能 減速開始点自動演算機能 原点サーチ動作 エンコーダカウンタ機能(割り込み機能付き) 三角駆動回避機能 入出力信号論理設定機能 フォワード/リバースオーバラン 即時/減速停止 サーボモータ制御 出力パルス数モニタ 加速/減速傾斜別設定 直線補間動作 |
||
| ドライバインターフェース | 出力 | クロック | 1/2クロック切替可 論理設定可 |
| アラーム | 論理設定可 | ||
| 入力 | インポジション | 論理設定可 | |
| 偏差カウンタオーバーフロー | 論理設定可 | ||
| センサ入力 | オーバーラン | フォワード/リバース 論理設定可 | |
| ニア原点 | 論理設定可 | ||
| 原点 | 論理設定可 | ||
| エンコーダインターフェース | 入力 | A/B相 位相1/2/4逓倍/CW/CCWクロックカウント |
|
| 出力 | 割り込み出力4点 | ||
| 専用入出力 | 入力 | 減速/減速停止/即時停止/同期 | |
| 出力 | パルス払い出し中/割り込み要求6点 | ||
| 汎用出力 | 2点 | ||
| 動作温度 | 0〜+70℃ | ||
| 保存温度 | -60〜+150℃ | ||
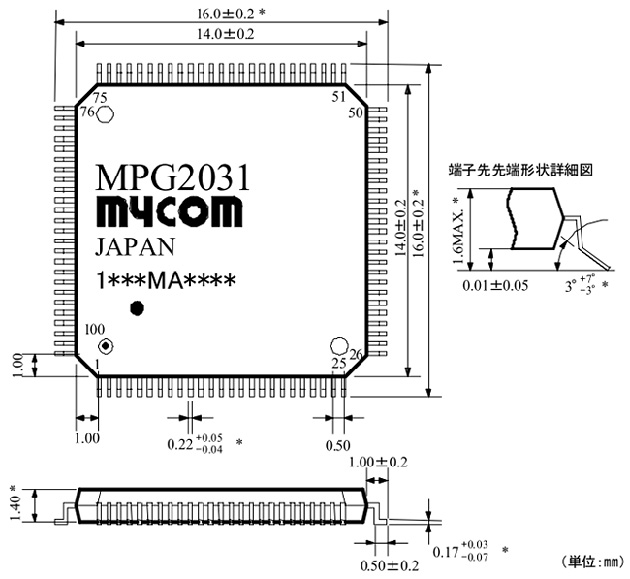
| パッケージ | 100ピン プラスチックQFP リードピッチ 0.5mm |
||
特徴的な機能
任意形状の加減速
加減速形状には、
・任意形状
・台形
の2モードがあります。
任意形状加減速は、内蔵されたメモリに加減速データを書き込むことで実現されます。これによりユーザは、サイクロイド曲線や放物線をはじめとする駆動システムに最適な加減速形状をプログラムすることができます。
任意形状の分解能は、31/63/127/255の中から選択出来ます。
内蔵メモリは8チャンネルに分割されており、最大8通りの加減速傾斜データを格納できます。
直線補間機能
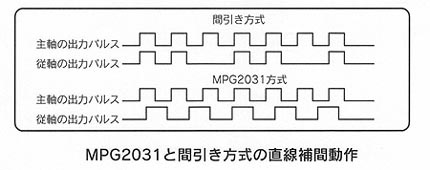
MPG2031を1個もしくは複数個用い、直線補間駆動が行えます。きわめて簡単な設定で補間駆動が実現でき、複雑な操作は不要です。MPG2031には直線補間用のパルス出力端子(OCP1:0)とパルス入力端子(ICP1:0)があり、移動量最大の軸(主軸)のCOP1:0とその他の軸(従軸)のICP1:0を結線することで、補間駆動を行います。主軸のパルスを受け取り従軸はそれぞれに設定された移動量に対応したパルスを出力します。
従軸のパルスは、移動量に対したほぼ均等に配分されたタイミングで出力されます。いわゆる’間引き’的なものではありません。また従軸の出力パルス波形は、等速時には50%になるようにデューティー比を確保したものです。ワンショット状ではありません。
外形図