パルス制御LSI
MPG1032
特徴
- ステッピングモータ・パルス列入力サーボモータ用パルスジェネレータLSI
- 内蔵メモリ・データ設定による任意形状加減速
- 任意形状加減速分解能、最大255
- 任意形状加減速データを最大8種類格納
- 主軸に同期し均等な出力タイミングが保証された多軸直線補間機能
- 多軸同期スタート機能
- 内蔵32ビットエンコーダカウンタ。割り込み機能出力4点
- 3種の原点サーチ動作
仕様
| 項目 | 内容 | |
|---|---|---|
| 電源電圧 | 3.3V(推奨範囲3.0〜3.6V) | |
| 基準クロック | 最大15MHz | |
| 総パルス数設定範囲 | 1〜16,777,215パルス 又は無限 | |
| 減速開始点設定範囲 | 0〜16,777,215パルス | |
| 周波数設定ステップ数 | 65,535 step | |
| 加減速傾斜設定ステップ数 | 65,535 step | |
| 出力パルス分周比数 | 1〜256 | |
| 任意形状傾斜データ数 | 128 | |
| 最大出力周波数 | 7.499886MHz 出力周波数範囲[Hz] 0.004〜265Hz (CLK=131kHz、分周比=256) 1〜65,535Hz (CLK=3.2768MHz、分周比=25) 114.4〜7,499,886Hz (CLK=15MHz、分周比=1) |
|
| 動作及び機能 | 任意形状および台形加減速駆動 減速開始点自動演算機能 フォワード/リバースオーバラン停止 スローダウン停止 即時非常停止 サーボモータ用パルス出力完了制御 サーボモータ用偏差カウンタオーバフローによる非常停止 出力パルス数モニタ 加減速速度別設定 直線補間機能 エンコーダカウンタ機能 割り込み機能付き 原点サーチ動作 スローダウン 出力周波数モニタ イベント出力(内蔵エンコーダカウンタ値コンペア) 外部起動(入力端子による起動・減速停止) |
|
| 汎用入出力端子 | 2端子 | |
| パルス出力 | 1パルス/2パルス切替 | |
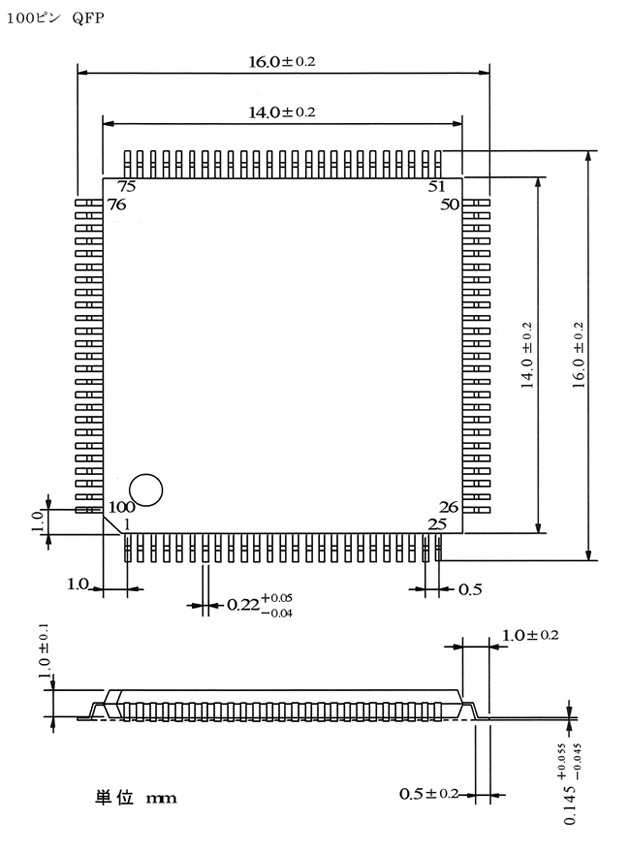
| パッケージ | 100ピン QFP ピンピッチ 0.5mm パッケージ(Body) 14.0×14.0mm パッケージ(PINtoPIN) 16.0×16.0mm |
|
特徴的な機能
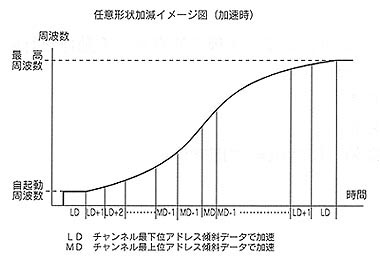
内蔵メモリによる任意形状加減速 傾斜データ切り替えタイミング16,777,216通り
内蔵の128ワード×16ビットメモリにデータを設定することにより、任意形状の加減速が行えます。
S字カーブはもとより、システムにあった加減速カーブの設定が可能になりました。
内部のレジスタで、傾斜角の切り替わりタイミングの設定を行えることにより、メモリ内の同じ傾斜データを使用して急峻あるいは緩慢な加減速カーブを、16,777,216通り形成することができます。
これにより始動・停止・加速から等速・等速からの減速の、よりスムーズな駆動を実現することができます。
任意形状加減速時の出力パルスレートは最大2MHzで、サーボモータ使用時においても、要請に充分応えられるものとなりました。
任意形状加減速分解能最大255
128ワードメモリに格納された傾斜データを、最下位アドレスデータから最大位アドレスデータ、折り返し最下位アドレスへとアクセスすることによって、加減速カーブそれぞれ最大255の分解能が得られます。
またメモリアドレスを16ワードずつ分け8チャンネルとし、それぞれ別個にアクセスすることができます。このチャンネルとコマンドレジスタでの分解能モードセレクタにより、31/63/127/255の分解能と最大8種の傾斜データを選択することができます。
多軸直線補間機能 同期スタート機能
直線補間機能は、主軸から従軸へのパルス出力OCPと、それを受ける従軸側の入力端子ICPを結線し、従軸側のレジスタに主軸の出力総パルス数と従軸自身の出力総パルス数を設定するだけで直線補間駆動を実現します。従軸の出力パルスは、間引き方式ではなく、主軸に同期した均等なタイミングで出力されます。
お互いのOCPとICPを結線しておけば、レジスタの設定だけで主軸と従軸の関係を入れ替えることができます。
多軸同期スタート機能は、各軸LSIのレジスタにデータを設定しコマンドでスタートをかけてスタンバイ状態にしておきます。すべてのLSIにデータ設定後、各LSIの入力端子PAUSEにCPUからスタート信号を送れば、各軸は同時にパルス出力を開始します。
32ビットエンコーダカウンタ 割り込み機能
32ビットエンコーダカウンタを内蔵しました。
モードの切り替えにより、エンコーダの2相クロック入力による1,2,4逓倍および2クロック入力によるアップダウンカウントが出来ます。
エンコーダカウンタがゼロの時信号を出力する割り込み端子を設けました。
同様にエンコーダカウンタの任意の値で割り込み出力する機能があり、設定値は動作中書き換え可能なことによって、割り込み出力を無制限に得ることができます。この出力は3チャンネルあり、システム動作中の任意の位置で補助機能として使用できます。
原点サーチ動作
入力端子HOME・NEARとコマンドにより、3種の原点サーチ動作を行います。
モード0 原点サーチ動作を行わない
モード1 NEAR=1で減速停止
モード2 NEAR=1で即時停止
モード3 NEAR=1で減速開始、HOME=1で即時停止
外形図