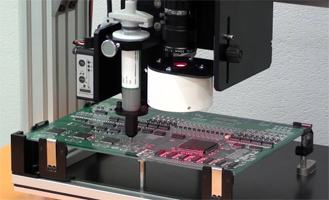
 MR-350DSは少量多品種での生産やリワーク作業に最適な小型卓上型のクリーム半田塗布ロボットです。 |
 ※商品にパソコンは含まれていません。 |
■ 画像認識により基板の位置ズレを高精度に補正
■ Z軸にはレーザ変位センサを搭載し、ノズルと基板の高さを±20μm以下で補正
■ X軸450mm Y軸300mのワイドストロークにより、Mサイズ基板(330m×250mm)にも対応
■ 駆動軸には独自技術で開発したネオサーボモータ・ドライバを搭載し、高精度な位置決めを実現
■ クリーム半田塗布に必要な機能を高次元にバランス良く搭載し、ローコスト化を実現!
簡単操作・プログラムレスの専用アプリケーションソフト
■ プリント基板作成時のガーバーデータ(メタルマスク用データ)から塗布座標値へ一発変換
 |
 |
|
| <Z軸 ツール部> カメラユニット、レーザ変位センサを搭載 |
Mサイズ基板まで対応したワイドストローク |
| <動画紹介> |
「MR-350DSデモ動画」(wmv形式 約18MB 約2分)
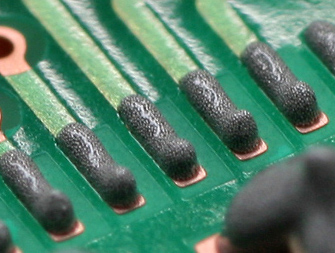
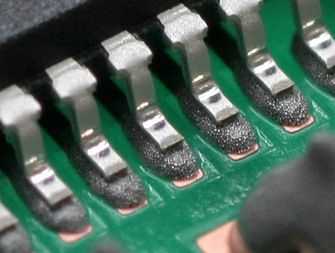
| <1>クリーム半田塗布 | <2>部品実装 | <3>リフロー後 |
 |
 |
 |
| <1>ガーバーデータ読み込み | <2>塗布位置予測 | <3>塗布位置指定 |
 |
 |
 |
| ガーバーデータ(メタルマスク用データ)をソフト内に読み込みます。 | 1クリックでガーバーデータを塗布座標値に変換する事が可能です。 | 塗布するパッドをマウス等で簡単に選択する事が可能です。またパッドを表示している画面の拡大縮小表示も可能です。 |
| 項 目 | 内 容 | |
| 型式 | MR-350DS | |
| 軸数 | 3軸(X・Y・Z軸) | |
| 動作範囲 | X・Y軸 | 450mm×300mm |
| Z軸 | 50mm | |
| 対応基板サイズ | 330mm×250mm以下 | |
| 最大可搬質量 | ワーク | 4.5kg (基板取付治具3.5kg含む) |
| ツール | 2kg (ディスペンサーヘッド約1.5kgを含む) | |
| 移動速度 | X・Y軸 | 0.1〜300mm/sec |
| Z軸 | 0.1〜150mm/sec | |
| 位置繰り返し精度 | X・Y軸 | ±0.01mm以下 |
| Z軸 | ±0.01mm以下 | |
| 分解能 | X・Y軸 | 1μm |
| Z軸 | 1μm | |
| 駆動方式 | MYCOM製ネオサーボモータ・ドライバ | |
| 操作スイッチ | 非常停止、スタート、リセット、原点復帰 | |
| ダウンロードプログラム数 | 8プログラム | |
| 汎用入出力 | 入力:8点 出力:6点 | |
| 専用入出力 | 入力 | Z軸補正動作用入力、プログラム起動、外部非常停止、リセット、原点復帰開始 |
| 出力 | Z軸補正動作用出力、ツールON、レディ、移動中、エラー、原点位置 | |
| インターフェース | RS232C (USB変換可) | |
| 画像認識仕様 | インターフェース | USB2.0準拠 (バスパワー動作) |
| 撮影解像度 | 水平640×垂直480 | |
| Z軸補正装置仕様 | 検知方式 | 赤色半導体レーザ(クラス2) |
| 高さ補正精度 | ±0.02mm | |
| 基準検知距離 | 80mm | |
| 入力電源 | 100V 3A以下 | |
| 周囲環境 | 動作時 | 温度:0〜40℃ 湿度:30〜80% 凍結・結露なきこと |
| 保存時 | 温度:0〜60℃ 湿度:20〜90% 凍結・結露なきこと | |
| 外形寸法 | 614mm(W)×582mm(D)×610mm(H) | |
| 質量 | 約40kg | |