 TAK-001は「アクチュエータ」「ステッピングモータ」「ドライバ」「コントローラ」をパッケージ化し、パルス列によるアクチュエータの制御の基礎を学ぶのに最適な実習教材キットです。 |
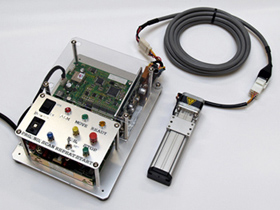 |
■ スライドアクチュエータの制御に必要な機器をパッケージ化
■ 制御パネルで簡単操作(動作開始/原点復帰/スキャン動作等)
■ パラメータの書き換えにはアプリケーションソフト(Windows版)を使用
■ 演習問題や技術用語集を収めたテキストも付属
■ 簡単配線
今回の実習教材キットは「岐阜工業高等専門学校 機械工学科 准教授 博士(工学) 山田 実様」にご協力頂き、キットを利用して「どのような課題から、どういった内容を理解頂くか」といった、実際にご使用頂く現場のご意見を反映して製品化が進められました。
岐阜工業高等専門学校様では、TAK-001用テキストに掲載の演習問題や山田先生にて追加考案頂く演習問題を用い、アクチュエータを動作させ、どのように動作するか速度線図、位置線図、加速度線図を作成し、ソフト(シュミレータ)を用いて検証を行う等の実習を実施される予定です。
<本体>

<アクチュエータ>
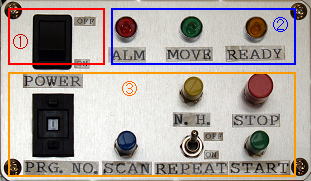 |
(1)電源スイッチ (2)LED表示灯 ■ALM ■MOVE ■READY (3)操作スイッチ ■N.H. ■STOP ■SCAN ■REPEAT ■START ■PRG.NO. |
| (1)電源スイッチ | |
| POWER | 入力電源のON/OFFを行います。 |
| (2)LED表示灯 | |
| ALM | エラーが発生した際に点灯します。 |
| MOVE | 移動命令実行中に点灯します。 |
| READY | 起動信号受付可能時に点灯します。 |
| (3)操作スイッチ | |
| N.H. | 原点復帰動作を行います。 |
| STOP | 移動命令実行中に押すとパルス出力が停止し、アクチュエータが即時停止します。 |
| SCAN | このスイッチを押している間、「PRG.NO.」の番号に応じたスキャン動作を行います。 |
| REPEAT | 「PRG.NO.」の番号に応じた移動データが繰り返し実行されます。 |
| START | 「PRG.NO.」の番号に応じた移動データが一度だけ実行されます。 |
| PRG.NO | 「0〜F」の16種類の中から移動命令の選択をします。 |
TAK-001本体へのプログラムの書き込みや書き換え、パラメータ設定等は専用のアプリケーションソフト「MNCGUI」で行います。
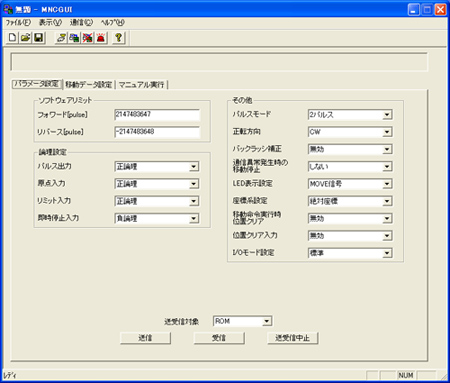 |
| 「パラメータ設定画面」 |
 |
| 「移動データ設定画面」 |
 |
|
||||||||||||||||||
サンプルプログラム設定例
| 項目 | 単位 | PRG.NO.1 | PRG.NO.2 | PRG.NO.3 | ・・・ |
| 自起動速度 | Hz | 1000 | 1000 | 2000 | ・・・ |
| 最高速度 | Hz | 11000 | 27000 | 38000 | ・・・ |
| 位置決め時間 | sec | 3 | 3 | 3 | ・・・ |
| 加速+減速時間 | sec | 1+1 | 1+1 | 1+1 | ・・・ |
| 加速(減速)傾斜 | Hz/msec | 10 | 26 | 36 | ・・・ |
| 移動量 | pulse | 23000 | 55000 | 78000 | ・・・ |
| 移動方向 | フォワード | フォワード | リバース | ・・・ |
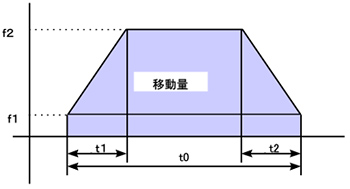
速度や移動量に関する計算式
| 記号 | 単位 | 意味 |
| G | Hz/msec | 加速(または減速)傾斜 |
| M | Hz | 最高速度 |
| P | pulse | 移動量 |
| Pg | pulse | 加速(または減速)で要するパルス数 |
| Pm | pulse | 最高速度での移動で要するパルス数 |
| S | Hz | 自起動速度 |
| T | sec | 位置決め時間 |
| Tg | sec | 加速(または減速)で要する時間 |
| Tm | sec | 最高速度での移動で要する時間 |
| 式1 | ・・・ | Tg = ( M - S) / ( G × 1000 ) |
| 式2 | ・・・ | G = ( M - S ) / ( Tg × 1000 ) |
| 式3 | ・・・ | Pg = ( M + S ) × Tg / 2 |
| 式4 | ・・・ | M = Pm / Tm |
| 式5 | ・・・ | Tm = T - ( Tg × 2) |
| 式6 | ・・・ | Pm = P - ( Pg × 2) |
| 式7 | ・・・ | P = ( 2 × Pg ) + Pm |
| 式8 | ・・・ | T = ( 2 × Tg ) + Tm |
| 演習例題 |
以下の条件から加速(または減速)傾斜Gを計算後、「PRG.NO.8」にそれらの条件を設定して動作を確認してみましょう。
| 項目 | 単位 | PRG.NO.8 |
| 自起動速度 | Hz | 1000 |
| 最高速度 | Hz | 13000 |
| 位置決め時間 | sec | 5 |
| 加速+減速時間 | sec | 2+2 |
| 加速(減速)傾斜 | Hz/msec | |
| 移動量 | pulse | 41000 |
ヒント:(式 2)から G を求めてみましょう。
答え:6 (文字を反転すると答えが見えます)