■ ナノ・ドライブ制御型の5相ステッピングモータ・ドライバを5軸使用し、高精度・低振動の制御を実現
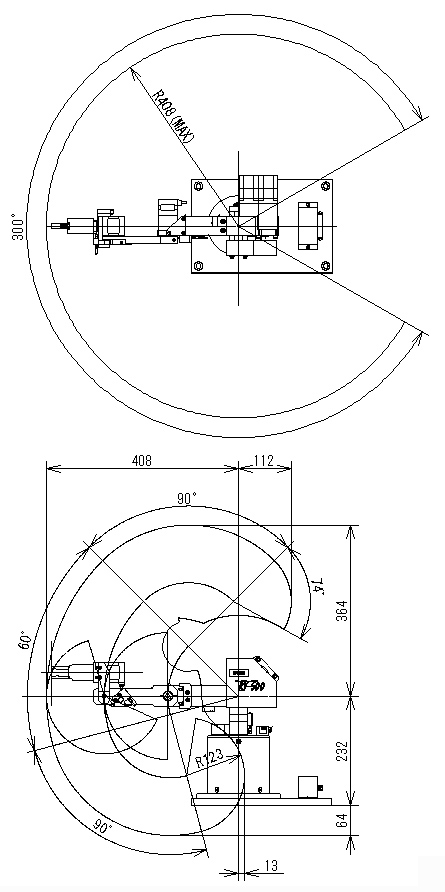
■ 位置繰り返し精度±0.1mm
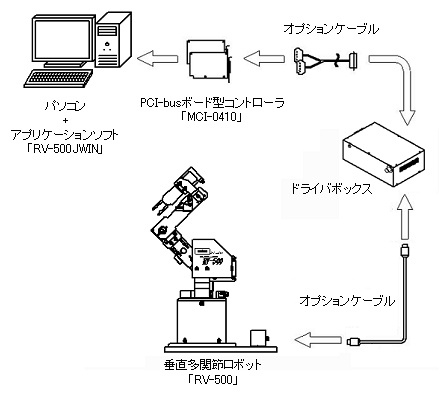
■ PCI-busコントローラボードと専用アプリケーションソフトを使いパソコンで簡単操作(Windows7対応)
■ ドライバボックスとオプションケーブルで省配線システム
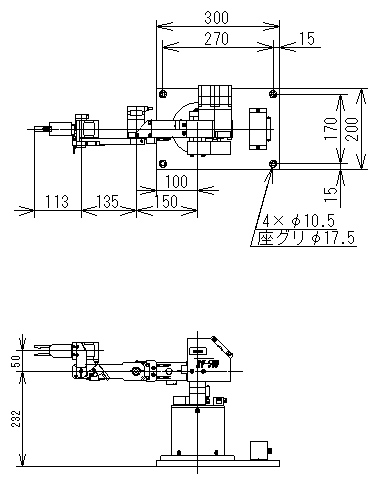
■ 小型・軽量 持ち運び可能なサイズ
|
|
||
|
|
||
■ ナノ・ドライブ制御型の5相ステッピングモータ・ドライバを5軸使用し、高精度・低振動の制御を実現 ■ 位置繰り返し精度±0.1mm ■ PCI-busコントローラボードと専用アプリケーションソフトを使いパソコンで簡単操作(Windows7対応) ■ ドライバボックスとオプションケーブルで省配線システム ■ 小型・軽量 持ち運び可能なサイズ |
||
|
|
||
| RV-500を用いてワーク搬送のデモを行いました。 | ||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
   |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|