 |
Remote Controller 「RC100」の特徴 |
 |
速度型コントローラ(電圧パルス変調方式)
・ボリューム設定により3点の速度設定記憶(自起動速度と他2点)
|
|
多彩な位置決めモードを搭載
・位置データ移動、・順次起動、・スキャン移動、・インチング移動、・原点復帰
(各種位置決めモードの詳細は下記にて動画紹介)
|
|
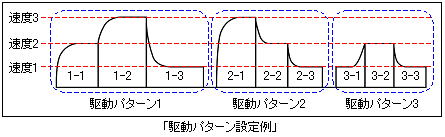
位置データは3パターン記憶
・1パターン内で最大3ポイントまで速度変更または停止可能な位置データの設定が可能(下図駆動パターン設定例参考)
|
|
各種パラメータや駆動データ設定は本体正面の4つのパネルスイッチで簡単に設定が可能です。設定や運転時の状態も本体パネルのLED表示によって簡単に確認が可能です。
|
|
高速周波数のパルス出力に対応し、ナノドライブ等の高分解能モータ・ドライバ駆動にも対応可能です。(標準品:Max100kHz 最高周波数の変更は特殊仕様によって可能)
|
|
|
|
| 「Remote Controller RC100 動画紹介」 |
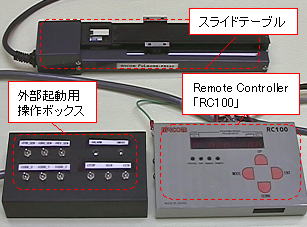
| デモ機構成 |
各機能名称をクリックすると解説記事にジャンプします。 |
今回動画でご紹介するデモ機は左図のような構成となります。
リモートコントローラ「RC100」でステッピングモータ+スライドテーブルを制御します。
RC100は本体のパネル操作で制御する方法と、外部起動による操作する2種類の方法で制御が可能です。
今回のデモでは外部起動用の専用操作ボックスを用意し、各種信号をスイッチで操作しています。
以下では「RC100」に搭載された各種動作モードについて動画にて解説します。
|
| |
|
| 1.位置データ移動 |
 |
位置データ移動は、予め設定された3つの駆動パターンの中から1つの駆動パターンを指定して実行します。
1つの駆動パターン内では、最大3ポイントまで速度変更または停止可能な位置データの設定が可能です。
|
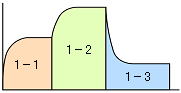
「駆動パターン1設定例」 |
|
| 「駆動パターン1設定例」 |
| パラメータ |
速度 |
パルス数 |
| 1 |
駆動パターン1-1 |
2 |
60,000 |
| 2 |
駆動パターン1-2 |
3 |
120,000 |
| 3 |
駆動パターン1-3 |
4 |
180,000 |
速度4は速度1(自起動速度)まで減速し、設定されたパルス数で停止します |
|
| 戻る |
|
| 2.順次起動 |
 |
順次起動は、実行命令(起動信号)を入力する度に駆動パターンを1から3まで順番に実行します。(例:「駆動パターン1」
→「パターン2」→「パターン3」→「パターン1」→「パターン2」〜)
駆動パラメータのスキップ設定により、順次起動の順番を飛ばす事が可能です。
(例:駆動パターン3を飛ばした場合 パターン1→2→1→2の繰り返しとなります)
|
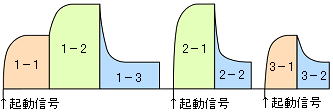
「駆動パターン1〜3 順次起動組み合わせ例」 |
|
| 「駆動パターン設定例」 |
| パラメータ |
速度 |
パルス数 |
| 1 |
駆動パターン1-1 |
2 |
60,000 |
| 2 |
駆動パターン1-2 |
3 |
120,000 |
| 3 |
駆動パターン1-3 |
4 |
180,000 |
| |
| 4 |
駆動パターン2-1 |
3 |
40,000 |
| 5 |
駆動パターン2-2 |
4 |
90,000 |
| 6 |
駆動パターン2-3 |
- |
- |
| |
| 7 |
駆動パターン3-1 |
2 |
70,000 |
| 8 |
駆動パターン3-2 |
4 |
90,000 |
| 9 |
駆動パターン3-3 |
- |
- |
速度4は速度1(自起動速度)まで減速し、設定されたパルス数で停止します |
|
|
| 戻る |
|
| 3.スキャン移動 |
 |
スキャン移動は実行命令がアクティブ中にパルスを出力し続け、非アクティブになると停止します。
手動モード(本体パネル操作)では、UP/DOWNキーでそれぞれフォワード/リバース方向へのスキャン移動を行います。
操作モード(外部起動)では、実行命令(STR)と回転方向設定(DIR)の組み合わせでスキャン移動を行います。
|
|
|
| 戻る |
|
| 4.インチング移動 |
 |
インチング移動は実行命令が入力されると1パルス出力するモードです。
手動モード(本体パネル操作)では、UP/DOWNキーでそれぞれフォワード/リバース方向への1パルス出力を行います。
操作モード(外部起動)では、実行命令(STR)と回転方向設定(DIR)の組み合わせで1パルス出力を行います。
|
|
|
| 戻る |
|
| 5.原点復帰 |
 |
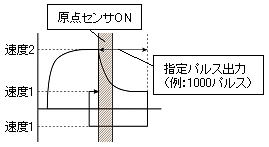
原点復帰を行う際には、速度設定と原点センサON後の反転駆動するまでのパルス数の設定を行います。
原点復帰は手動モード(本体パネル操作)、操作モード(外部起動)どちらでも行う事が可能です。
|
「原点復帰動作例」 |
|
| パラメータ設定例 |
| 速度設定 |
位置データ設定 |
| 2 |
1000 |
左図の例では、原点センサONまでは「速度2」で移動し、原点センサON後に「速度1(自起動)」に減速した後、1000パルス駆動したところで反転動作を行います。
|
|
|
| 戻る |
|
| 6.速度調整 |
各種動作で選択する3つの速度(SPD1〜3)を調整するモードです。
本体パネル操作で速度調整モードに設定後、調整する速度番号を選択し、本体下部のボリュームを回し速度を調整します。
LEDには調整中の速度が表示されます。
|
 |
 |
|
|