| 任意形状加減速機能 |
搭載機種     |
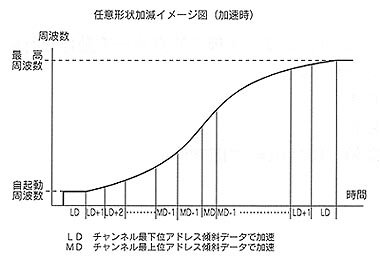
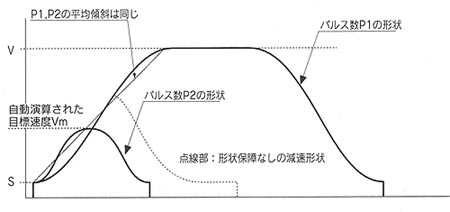
内蔵メモリにデータを設定することにより、任意形状の加減速が行えます。
S字カーブはもとより、システムにあった加減速カーブの設定が可能です。
内部のレジスタで、傾斜角の切り替わりタイミングの設定を行えることにより、メモリ内の同じ傾斜データを使用して急峻あるいは緩慢な加減速カーブを、16,777,216通り形成することができます。
これによりサイクロイド曲線や放物線をはじめとする、駆動システムに最適な加減速形状をプログラムする事が出来ます。
加減速データの中間まで作成し、残りはミラー反転したデータとなります。
|
 |
|
| 完全任意形状加減速機能 |
| 搭載機種 |
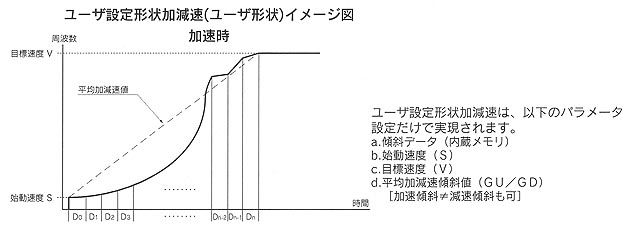
内蔵メモリに形状データを設定することにより、完全に自由な加減速形状での駆動が可能です。S字形状に限定することなく個々のアクチュエータに最適な駆動形状が実現出来ます。
|
|
|
| 自動生成S字加減速機能 |
| 搭載機種 |
S字形状を自動生成し、加減速駆動を行います。設定するパラメータは台形駆動と同じで、S字生成のための設定は必要ありません。
|
|
|
| 多軸同期スタート機能 |
| 搭載機種 |
各軸LSIのレジスタにデータを設定しコマンドでスタートをかけてスタンバイ状態にしておきます。すべてのLSIにデータ設定後、各LSIの入力端子PAUSEにスタート信号を送れば、各軸は同時にパルス出力を開始します。
|
|
|
| 直線補間機能 |
| 搭載機種 |
移動量が最大の軸(主軸)とその他の軸(従軸)を結線する事で直線補間駆動を行います。主軸のパルスを受け取り従軸は、それぞれに設定された移動量に対応したパルスを出力します。
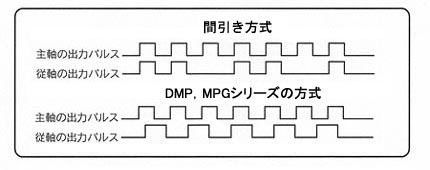
従軸の出力パルスは、間引き方式ではなく、主軸に同期した均等なタイミングで出力されます。
|
|
|
| 連続補間駆動/パス動作 |
| 搭載機種 |
補間機能とバッファリング順序モードを使い、連続補間駆動/パス動作が行えます。パラメータの入れ替えが高速に自動で行われまた補間駆動専用の入出力も持っていますので、多軸を同期させた補間動作や周速制御が行えます。
|
|
|
| 三角駆動回避機能 |
| 搭載機種 |
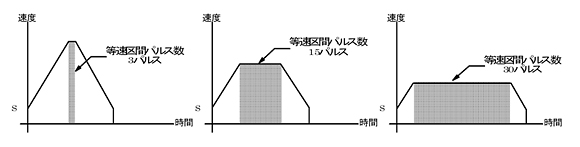
駆動システムにストレスを与える三角駆動を、自動的に回避します。
デフォルト設定で3パルス分の等速区間を確保します。
また等速区間設定値レジスタにより、等速区間のパルス数を指定する事ができます。
|
|
|
| 加減速形状の保護・保証機能 |
| 搭載機種 |
加速中に減速指令や速度オーバーライドが発効されると、加速形状は急激に変化しアクチュエータにストレスをかけてしまいます。
この間の動作を滑らかにするため、形状保護(まるめ保護)を行います。
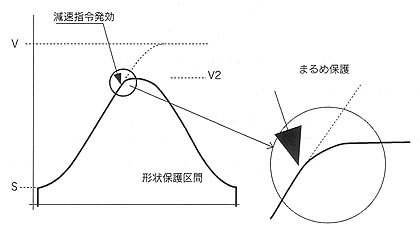
移動量と目標速度に矛盾があると、動作は目標位置に達しない三角駆動となります。この矛盾を自動検出し目標速度を修正して動作形状を保証します。
|
|
|
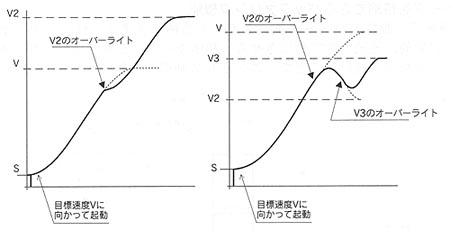
| 速度オーバーライド機能 |
| 搭載機種 |
パルス出力中に目標速度レジスタを書き換えると、書き換わった速度へ加減速するオーバーライド動作を行います。この時形状保護(まるめ保護)機能も働き、滑らかな動作を行います。
|
|
|
| 32ビットエンコーダカウンタ |
| 搭載機種 |
32ビットエンコーダカウンタを内蔵しました。
モードの切り替えにより、エンコーダの2相クロック入力による1,2,4逓倍および2クロック入力によるアップダウンカウントが出来ます。
|
|
|
| 自由バイト長の汎用カウンタ |
| 搭載機種 |
コンペア機能付き8ビット長カウンタが8本用意されています。8ビット単位で任意バイト長につなげる事が可能で、最大64ビットコンペアレジスタ付きカウンタになります。
外部からのイベント信号で、カウント動作させる事も出来ます。
上位32ビットを、エンコーダカウンタまたは偏差カウンタとして使用できます。
|
|
|
| 原点サーチ動作 |
| 搭載機種 |
原点サーチ用の入力端子を持ち、自動的に原点サーチ動作を行います。
原点サーチには3種類のモードがあります。
モード1:NEARで即時停止
モード2:NEARで減速停止
モード3:NEARで減速、Z/ORG入力カウントで停止
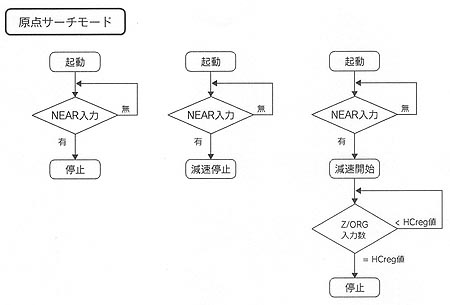
注:MPG1032,MPG2031ではモード3のZ相カウント機能はありません。
|
|
|
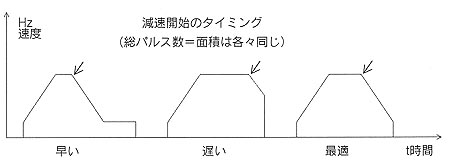
| 減速開始点自動演算機能 |
搭載機種    |
加速した後、減速をして停止する場合、発生するパルスの総数は希望した通り正確でなければなりません。しかし減速開始のタイミングが早ければ最後に低速でもたつき、タイミングが遅ければ十分低速に達しない前に停止するため、慣性で設定位置よりズレてしまいます。
減速開始点の計算は従来ソフトウェアで行いましたが、最適なタイミングで減速を自動的に開始することができます。
|
|