Tweet
技研便り
ステッピングモータの「脱調」について
技研便りは過去にメールマガジンで連載していた技術関連情報の記事です。(2017年再編集)ステッピングモータ特有の「脱調」という現象についての解説、及び対策商品についてご紹介致します。
脱調とは
| ステッピングモータは過負荷や急な速度変化の際に、入力パルス信号とモータ回転との同期が失われる事があります。この様な状態を、脱調といいます。 脱調が起こる原因は様々ありますが、代表的な例を挙げ、下記にその原因と対策方法をご紹介します。 |
脱調の原因とその対策方法
| (1)起動時・加減速中の脱調 | |
| ・加減速の傾斜を緩やかにする | 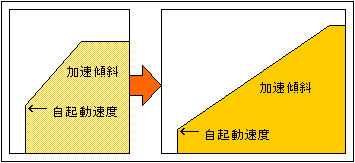 |
| ・自起動速度を下げる | |
| ・加減速傾斜をS字形状にする | 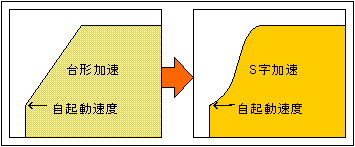 |
| (2)等速動作中の脱調 | |
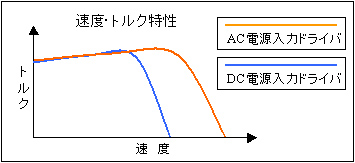
| ・DC電源入力タイプのドライバを使用中の場合、AC電源入力タイプのドライバに変更する (AC電源入力タイプドライバの方が高速領域の特性が良い) |
 |
| ・モータのランクをアップさせる | |
| (3)振動による脱調 | |
| ・分解能を上げる | |
| ・モータにダンパーを取り付ける |  振動対策用ダンパー「Fine Damper」のラインナップはこちら |
| ・モータには固有の振動領域があり、加速傾斜や最高速度等のパラメータを見直し、その振動領域を避けるような設定を行う | |
| ・トルクに余裕がある場合には、駆動電流を下げる事も振動を抑制する手段となります | |
| (4)過負荷による脱調 |
| ・ステッピングモータを選定する際には、本来必要トルクの2倍以上の余裕率を見て選定しますので、過負荷(トルク不足)で脱調した際には機構的な問題等から一時的に想定以上のトルクがかかっている可能性があります。 |
| ・モータのランクをアップさせる。 |