| 動画内でのティーチング機能/配列コピーの操作手順 |
 |
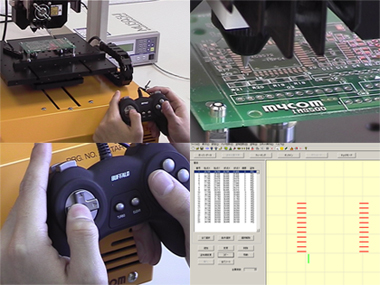
<手順1>
赤丸で囲まれた範囲のパッドをティーチング機能と配列コピー機能を使って塗布位置データを作成し、クリーム半田の塗布を行います。
|
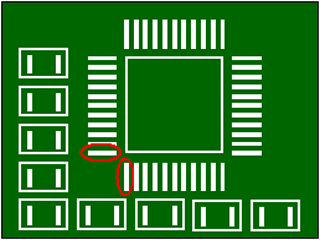 |
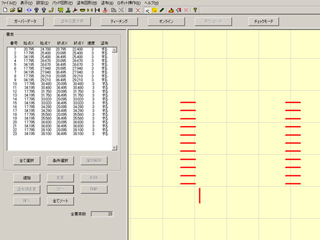
<手順2>
左図赤丸で囲まれた2つのパッドをティーチング機能を使って座標値データ化を行います。
|
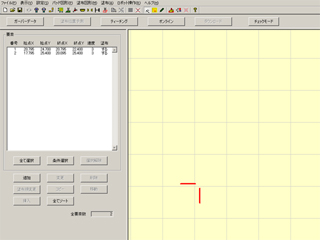 |
<手順3>
アプリケーションソフトにてデータ化されたパッドを確認する事が出来ます。
|
 |
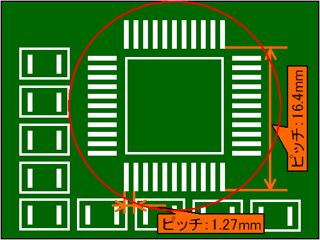
<手順4>
ティーチング機能等で作成された塗布位置データをX軸Y軸それぞれのピッチとコピーする個数を指定して配列コピーを行います。
ここでは、下記データのような配列コピーを行いました。
|
ピッチ |
コピーする個数 |
| X軸 |
16.4mm |
2 |
| Y軸 |
1.27mm |
11 |
|
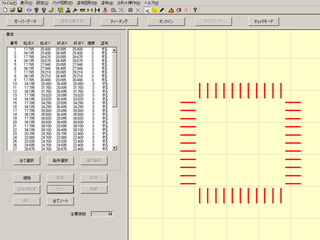 |
<手順5>
<手順4>と同様に、縦向きのパッドも配列コピーを行い、塗布位置データが完成しました。
|
ピッチ |
コピーする個数 |
| X軸 |
1.27mm |
11 |
| Y軸 |
16.4mm |
2 |
|