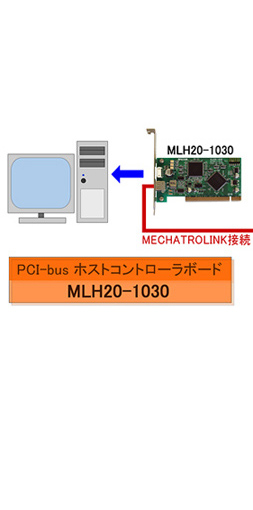
| デモ機構成 |
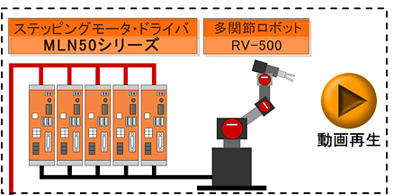
■ MECHATROLINK-Ⅱ対応
ステッピングモータ・ドライバ「MLN50」
+
■ 多関節ロボット 「RV500」 |
 |
g0711-rv.wmv
640×480(750kbps)
Windows Media Player用 |
| MECHATROLINK-Ⅱ対応ナノ・ドライブ制御5相ステッピングモータ「MLN50」を5軸使用し、多関節ロボット「RV-500」を制御しています。 |
■ MECHATROLINK-Ⅱ対応
サーボモータ・ドライバ
+
■ スライドテーブル |
 |
g0711-sv1.wmv
640×480(750kbps)
Windows Media Player用 |
| MECHATROLINK-Ⅱ対応のサーボモータ・ドライバでスライドテーブルを駆動し、多関節ロボット「RV-500」を左右に動作させています。 |
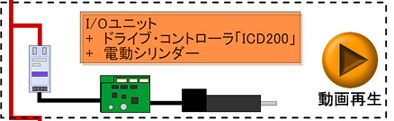
■ MECHATROLINK-Ⅱ対応 I/Oユニット
+
■ I/O起動型ドライブ・コントローラ 「ICD200」
+
■ 電動シリンダー 「PULMORE・ΣCシリーズ」 |
 |
g0711-io.wmv
640×480(750kbps)
Windows Media Player用 |
| MECHATROLINK-Ⅱ対応のI/OユニットでI/O起動型ドライブ・コントローラ「ICD200」を駆動し、3軸の電動シリンダーを制御しています。 |
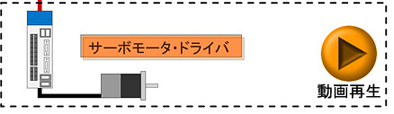
■ MECHATROLINK-Ⅱ対応
サーボモータ・ドライバ |
 |
g0711-sv2.wmv
640×480(750kbps)
Windows Media Player用 |
| MECHATROLINK-Ⅱ対応のサーボモータドライバでサーボモータを駆動しています。 |