マイコムのナノ・ドライブ制御とマイクロステップ制御との大きな違いには、ナノ・ドライブによるモータの微少回転角度が均等であること、様々なモータについても均等になるように調整が可能です。 ナノ・ドライブを行うドライバ回路はナノ・ドライブデータを持っていて、そのデータに従ってモータの微少角回転が制御されます。このナノ・ドライブデータは、微少角駆動を行うモータ各相の電流バランスを制御する指令値であり、機械的にも電気的にも様々な特性を持つステッピングモータ毎に異なったデータとなります。従って編集が可能であることが必要となり、個々のモータに最適なデータを作ることができます。 なお従来ステッピングモータの回転角をフルステップやハーフステップと言うように、ナノドライブにて回転する微少角をナノステップと言うことにします。 |
||||||||||||||||||||||||||||||||||||
もし、ここに機械誤差の無い理想モータがあるとすると、そのモータが5相モータであればフルステップ駆動の1ステップは0.72°で回転します。2相モータなら、1.8°です。この理想的な5相モータを分解能1/1000でナノドライブ制御すると、微少回転角(ナノステップ)は0.72÷1,000=0.00072°刻みとなります。理想的な2相モータならば、0.0018°刻みとなります。 しかし機械誤差の無いモータは無く、またその誤差も最大値が示されるだけでどのモータでも同じではありません。 例えば、機械誤差が最大±0.05°の5相モータAがあるして、このモータがフルステップ駆動された時、下表1(■の囲み内)のような進み角となるとします。 (表1)
表1のモータAは、1フルステップ目から順に−0.05°、−0.01°、+0.04°といった誤差を持つとすると、原点より1ステップ毎に、0.67°、1.43°、2.20°と進む事になります。ナノドライブは1フルステップ角度内を、設定されたナノドライブ分解能数に従い、均等に微少角制御します。 このように微少角回転する動作のイメージを、下図に示します。 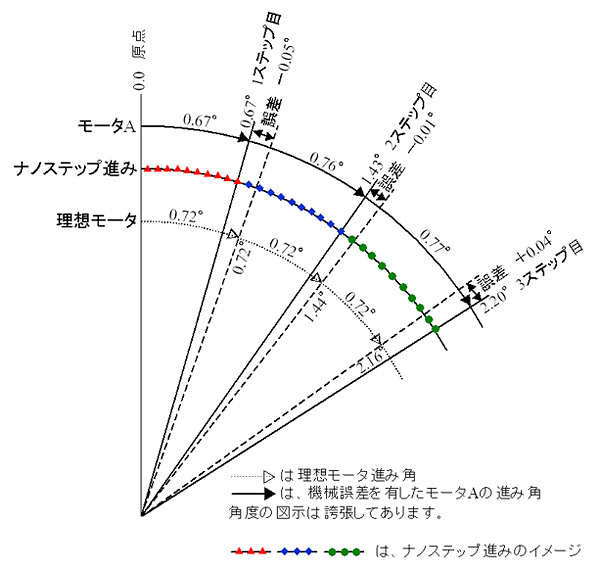 |
||||||||||||||||||||||||||||||||||||
ナノドライブによる微少角制御は、ナノドライブデータに従った動作です。そのデータが、角度の均等割を目的としたものであれば回転動作は均等角で進み、特殊な回転角の連続とするものであればそれに従った回転動作となります。つまりナノ・ドライブ制御の特徴に、微少角制御が可能な方法を加えられます。 後述する補正や調整と言った制御は、より微少な制御性能を持つことで、より制御精度が得られる関係にあります。 |
||||||||||||||||||||||||||||||||||||
ステッピングモータ各相の電流に変化が無い、つまり回転停止状態では、モータは励磁トルクによりその位置に動かず止まっていようとします。それはステッピングモータの長所のひとつです。このようなステッピングモータであっても、負荷が加われば停止位置に変位が生じます。 例えばこの変位が、0.005°であったとします。5相モータのフルステップ角0.72°やハーフステップ角0.36°に比べ、0.005°は微々たる変位と言えます。しかし1/100ナノドライブ制御では、そのナノステップ角平均値は0.0072°(0.72÷100)ですから無視出来ない大きさになります。1/1000であればナノステップ角平均値は0.00072度(0.72÷1000)であり、変位量がナノステップ角より大きくなり、角度制御しているとは言えなくなります。 |
||||||||||||||||||||||||||||||||||||
モータへの負荷が一定であれば変位も一定と見なすことができ、ナノドライブデータを変位と逆方向となる値で一律に補正するか、変位をあらかじめ見込んだ回転角度管理を行えば良いことになります。負荷が変動する動作では、一律な補正値は使えません。 一律でない変位量を実際の回転動作から観測し、それを元にナノドライブデータを作れば補正制御ができます。またエンコーダやリニアスケール等のフィードバック位置(角度)情報による補正も考えられます。 角度補正とは、"より細かい"微少角制御とも言えます。例えば0.1°の補正精度を実現するには、単純に考えれば0.05°以下の角度制御の実力が必要です。角度制御の実力が細かければ細かいほど、保証可能な補正精度は向上します。 ナノドライブ制御の特徴である微少角制御が、補正制御にも有効となります。 |
||||||||||||||||||||||||||||||||||||
絶対角度精度を確保する制御でも、これは実際のモータの回転角度を絶対角度との変位と捉えれば、前述の補正方法を用い目的とする精度の制御が可能となります。 |